
Special Pad
 | ・Assists in non-contact workpiece transfer ・Max. workpiece suction distance: 10 mm ・2 types are available: Cyclone type: High lift: Max. 44 N Bernoulli type: Amplitude of the workpiece during gripping: ±0.01 mm or less |

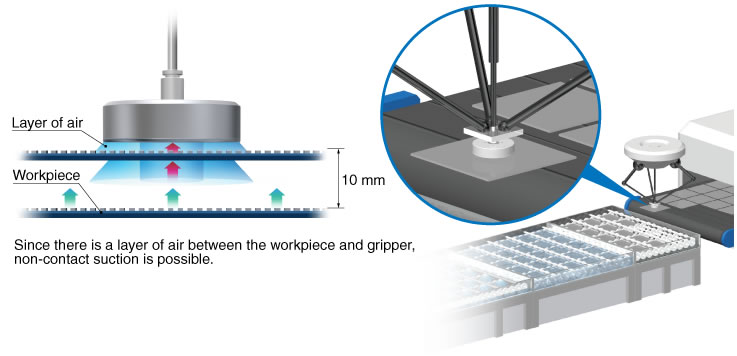
■Max workpiece suction distance:10 mm
Original groove-channel design allows cyclone effect with
large suction area and even pressure dispersion!

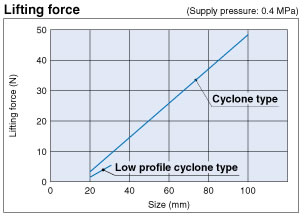
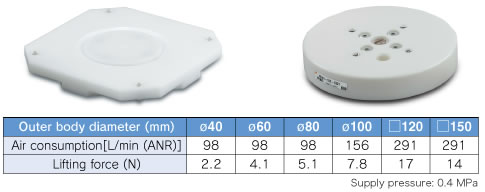
・High lifting force: Max. 44 N (Outer body diameter: ø100)
・Totaled 5 size: ø20/ø40/ø60/ø80/ø100

・Working Principle
Air is discharged in the whirling direction.

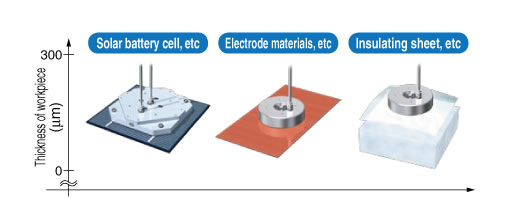
・Various workpiece suction methods are available.

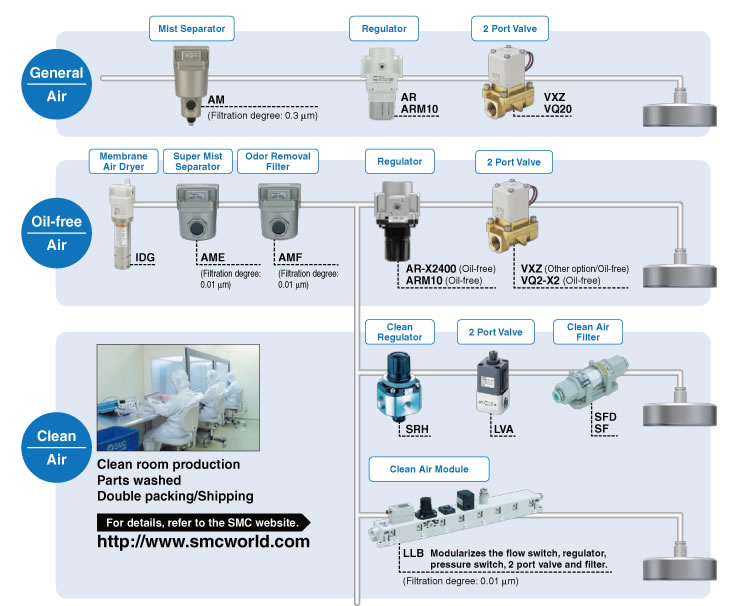
・Grease-free
・Can be disassembled and cleaned the inside.
・Made to Order
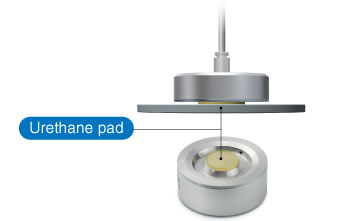
With urethane pad* (-X207)
* Except ø20
・Mitigation of impacts and prevention of damage during lifting
・No need to install a guide
With multi-port (-X211)
The presence of a workpiece can be
checked by installing a sensor.

Thickness: 1.8 mm Weight: Approx. 1.3 g*
* Outer body diameter: ø20
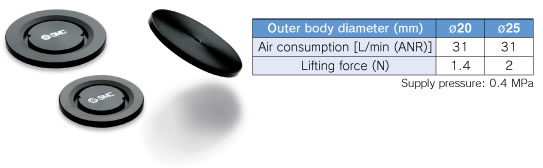
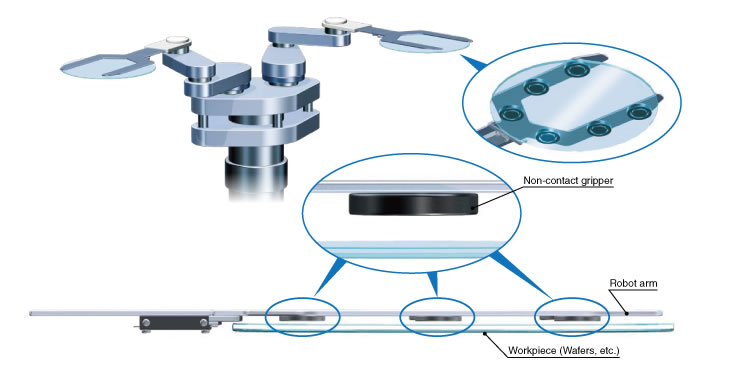
・Can be mounted on the end of the robot arm.
・Two sizes (ø20 and ø25) are available.
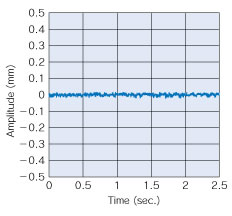
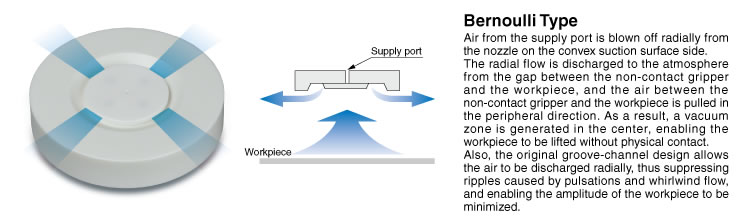
Original groove-channel design allows the Bernoulli effect with suppressing the amplitude of the workpiece during gripping!
Amplitude of the workpiece during gripping: ±0.01 mm*or less
* Solar battery silicon cell(□125 mm, t = 250 μm)
* In SMC conditions
Size:□120

Size:ø100
How to calculate

Working Principle
Air is discharged radially.
Various workpiece suction methods are available.
・Reduction of rotation load * No directionality of whirlwind air
・Standardization of multi-port* * Except ø40
・Grease-free
・Can be disassembled and cleaned the inside.
Non-contact Gripper XT661
- Product Code: XT661 Non-contact Gripper
- Availability: In Stock
-
-